Linearisieren des Differentialgleichungssystems für
kleine Auslenkungen ![]() ergibt:
ergibt:
Kriterium für Stabilität (lokal): Wenn ![]() stabil ist, hat
keiner der Eigenwerte der Jakobi-Matrix
stabil ist, hat
keiner der Eigenwerte der Jakobi-Matrix ![]() einen positiven
Realteil.
einen positiven
Realteil.
Die
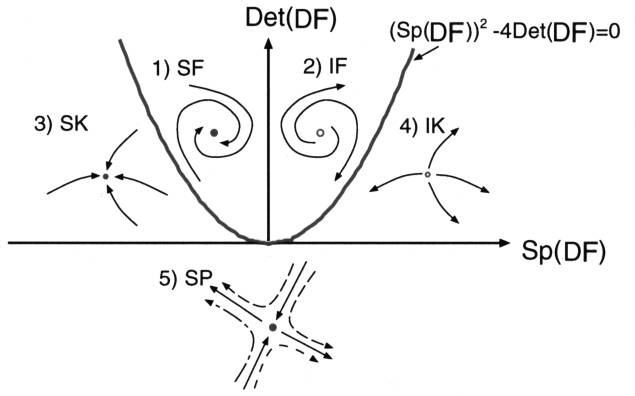
genaue Klassifizierung der Fixpunkte erfolgt nach (siehe Graphik):
1. stabiler Fokus (SF):
Sp(DF) < 0, Det(DF) > 0, (Sp(DF)![]() < 4Det(DF)
< 4Det(DF)
2. instabiler Fokus (IF):
Sp(DF) > 0, Det(DF) > 0, (Sp(DF)![]() < 4Det(DF)
< 4Det(DF)
3. stabiler Knoten (SK):
Sp(DF) < 0, Det(DF) > 0, (Sp(DF)![]() > 4Det(DF)
> 4Det(DF)
4. instabiler Knoten (IK):
Sp(DF) > 0, Det(DF) > 0,
(Sp(DF)![]() > 4Det(DF)
> 4Det(DF)
5.
Sattelpunkt: Det(DF) < 0 .