3.2 Transkritische Bifurkation
Um
eine Vorstellung der transkritischen Bifurkation zu erhalten, geht man genauso
vor, wie bei der Sattel-Knoten-Bifurkation, zuerst betrachten wir ein
dynamisches System:
![]() ,
,
die Differentialgleichung vom nichtlinearen Typ wird
eine Stufe komplizierter gewählt, das ist der Typ von Differentialgleichung (in
Normalform), bei dem transkritische Bifurkationen auftreten:
![]()
![]() .
.
Wiederum gesucht sind nun die stationären Lösungen
der Differentialgleichung, um Aussagen über deren Stabilitätsverhalten treffen
zu können.
Die
stationäre Lösung ist gegeben durch:
![]()
Û ![]()
Û ![]()
![]()
![]()
Für
diese Fixpunkte ist die lineare Stabilitätsuntersuchung durchzuführen. Im
allgemeinen Fall lautet die linearisierte Differentialgleichung für kleine
Auslenkungen ![]() :
:
Für
den vorliegenden Fall ergibt sich also:
und
somit für die Determinante der Jakobi-Matrix der Ausdruck
![]() , das Problem ist eindimensional.
, das Problem ist eindimensional.
Betrachten
wir nun den 1. Fixpunkt und die zugehörige, linearisierte
Differentialgleichung:
![]()
![]()
![]()
Die allgemeine Lösung dieser linearisierten
Differentialgleichung lautet:
Für den 2. Fixpunkt und die zugehörige,
linearisierte Differentialgleichung ergibt sich:
![]()
![]()
![]()
Die allgemeine Lösung dieser linearisierten
Differentialgleichung lautet:
Der Fixpunkt ![]() ist also stabil für m > 0 (stabiler Knoten) und instabil für m < 0 (Sattelpunkt).
ist also stabil für m > 0 (stabiler Knoten) und instabil für m < 0 (Sattelpunkt).
Der Fixpunkt ![]() hingegen ist stabil
für m < 0 (stabiler Knoten) und instabil für m > 0 (Sattelpunkt).
hingegen ist stabil
für m < 0 (stabiler Knoten) und instabil für m > 0 (Sattelpunkt).
Mathematisch anschaulich läßt sich dieses Ergebnis
wieder mit den anschwellenden und abklingenden Exponentialfunktionen in
Abhängigkeit vom Vorzeichen des Kontrollparameters m herleiten. Die so erhaltenen Ergebnisse
stimmen mit der Klassifikation der Fixpunkte mittels Linearer
Stabilitätsanalyse überein.
Im Parameterraum ergibt sich damit folgendes Bild:
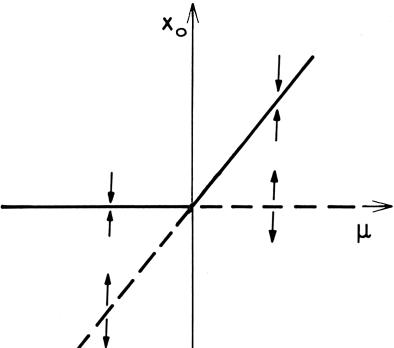
Ein Sattelpunkt und ein stabiler Knoten vereinigen
und trennen sich wieder. Am Bifurkationspunkt ![]() überschneiden sich
die Graphen des ersten und zweiten Fixpunktes (lat. trans – über, jenseits),
daher der Name: transkritische Bifurkation.
überschneiden sich
die Graphen des ersten und zweiten Fixpunktes (lat. trans – über, jenseits),
daher der Name: transkritische Bifurkation.
Während des Seminarvortrags wurde ein Beispiel aus
der Anwendung, der Laser, genannt: Hier ist "x" die emittierte Photonenzahl.
Unterhalb der Laserschwelle, also für m < 0, gibt es keine Verstärkung, der Ast ![]() ist stabil, der
instabile Ast fehlt allerdings, da es keine negative Verstärkung gibt. Oberhalb
der Laserschwelle, also für m > 0, wird der Ast
ist stabil, der
instabile Ast fehlt allerdings, da es keine negative Verstärkung gibt. Oberhalb
der Laserschwelle, also für m > 0, wird der Ast ![]() stabil, es gibt Verstärkung. Der Ast
stabil, es gibt Verstärkung. Der Ast ![]() , also der Bereich ohne Verstärkung, wird instabil.
, also der Bereich ohne Verstärkung, wird instabil.